

Sommaire

Généralité
On rencontre encore régulièrement des moteurs à courant continu à excitation indépendante dans les salles des machines des immeubles d’un certain âge. En général, ils font partie d’un groupe Ward-Leonard qui permet d’aisément faire varier la vitesse de rotation.
Actuellement, du groupe Ward-Leonard, on ne conserve que le moteur à courant continu qui, cette fois, est associé à un variateur de vitesse statique (variateur électronique) dont la technologie est plus simple et peu onéreuse tout en demandant peu d’entretien et en offrant des performances élevées dans une plage de vitesse très large (de 1 à 100 %).
Principe de fonctionnement
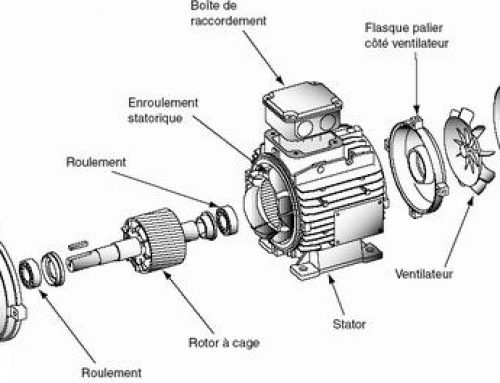
Le moteur à courant continu se compose :
- de l’inducteur ou du stator,
- de l’induit ou du rotor,
- du collecteur et des balais.
Lorsque le bobinage d’un inducteur de moteur est alimenté par un courant continu, sur le même principe qu’un moteur à aimant permanent (comme la figure ci-dessous), il crée un champ magnétique (flux d’excitation) de direction Nord-Sud.
Une spire capable de tourner sur un axe de rotation est placée dans le champ magnétique. De plus, les deux conducteurs formant la spire sont chacun raccordés électriquement à un demi collecteur et alimentés en courant continu via deux balais frotteurs.
D’après la loi de Laplace (tout conducteur parcouru par un courant et placé dans un champ magnétique est soumis à une force), les conducteurs de l’induit placés de part et d’autre de l’axe des balais (ligne neutre) sont soumis à des forces F égales mais de sens opposé en créant un couple moteur : l’induit se met à tourner !

Si le système balais-collecteurs n’était pas présent (simple spire alimentée en courant continu), la spire s’arrêterait de tourner en position verticale sur un axe appelé communément “ligne neutre”. Le système balais-collecteurs a pour rôle de faire commuter le sens du courant dans les deux conducteurs au passage de la ligne neutre. Le courant étant inversé, les forces motrices sur les conducteurs le sont aussi permettant ainsi de poursuivre la rotation de la spire.
Dans la pratique, la spire est remplacée par un induit (rotor) de conception très complexe sur lequel sont montés des enroulements (composés d’un grand nombre de spires) raccordés à un collecteur “calé” en bout d’arbre. Dans cette configuration, l’induit peut être considéré comme un seul et même enroulement semblable à une spire unique.
Caractéristiques
Les avantages et inconvénients du moteur à courant continu sont repris ci-dessous :
|
|
(+)
(-)
|
Machine réversible
Dans le régime de fonctionnement des ascenseurs à traction, le treuil à courant continu peut :
- Tantôt fonctionner en moteur lorsque le système cabine et contre-poids s’oppose au mouvement de rotation (charge dite “résistante”); le moteur prend de l’énergie au réseau.
- Tantôt travailler en générateur lorsque le même système tend à favoriser la rotation (charge dite “entrainante”); le générateur renvoie de l’énergie au réseau.
Type de moteur à courant continu
Suivant l’application, les bobinages du l’inducteur et de l’induit peuvent être connectés de manière différente. On retrouve en général :
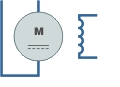
Des moteurs à excitation indépendante.
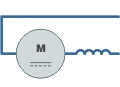
Des moteurs à excitation parallèle.

Des moteurs à excitation série.
Des moteurs à excitation composée.

La plupart des machines d’ascenseur sont configurées en excitation parallèle ou indépendante. L’inversion du sens de rotation du moteur s’obtient en inversant soit les connections de l’inducteur soit de l’induit.
L’inducteur
L’inducteur d’un moteur à courant continu est la partie statique du moteur. Il se compose principalement :
- de la carcasse,
- des paliers,
- des flasques de palier,
- des portes balais.


Inducteur.
Le cœur même du moteur comprend essentiellement :
- Un ensemble de paires de pôles constitué d’un empilement de tôles ferro-magnétiques.
- Les enroulements (ou bobinage en cuivre) destinés à créer le champ ou les champs magnétiques suivant le nombre de paires de pôles.
Pour des moteurs d’une certaine puissance, le nombre de paires de pôles est multiplié afin de mieux utiliser la matière, de diminuer les dimensions d’encombrement et d’optimaliser la pénétration du flux magnétique dans l’induit.
L’induit
L’induit du moteur à courant continu est composé d’un arbre sur lequel est empilé un ensemble de disques ferro-magnétiques. Des encoches sont axialement pratiquées à la périphérie du cylindre formé par les disques empilés. Dans ces encoches les enroulements (bobines de l’induit) sont “bobinés” selon un schéma très précis et complexe qui nécessite une main d’œuvre particulière (coûts importants). Pour cette raison, on préfère, en général, s’orienter vers des moteurs à courant alternatif plus robuste et simple dans leur conception.


Induit.
Chaque enroulement est composé d’une série de sections, elles même composées de spires; une spire étant une boucle ouverte dont l’aller est placé dans une encoche de l’induit et le retour dans l’encoche diamétralement opposée. Pour que l’enroulement soit parcouru par un courant, ses conducteurs de départ et de retour sont connectés aux lames du collecteur (cylindre calé sur l’arbre et composé en périphérie d’une succession de lames de cuivre espacée par un isolant).
Composition de l’induit.
L’interface entre l’alimentation à courant continu et le collecteur de l’induit est assuré par les balais et les porte-balais.
Les balais
Les balais assurent le passage du courant électrique entre l’alimentation et les bobinages de l’induit sous forme d’un contact par frottement. les balais sont en graphite et constituent, en quelques sortes, la pièce d’usure. Le graphite en s’usant libère une poussière qui rend le moteur à courant continu sensible à un entretien correct et donc coûteux.

L’ensemble balais, porte-balais et collecteur.
Le point de contact entre les balais et le collecteur constitue le point faible du moteur à courant continu. En effet, c’est à cet endroit, qu’outre le problème d’usure du graphite, la commutation (inversion du sens du courant dans l’enroulement) s’opère en créant des micros-arcs (étincelles) entre les lamelles du collecteur; un des grands risques de dégradation des collecteurs étant leur mise en court-circuit par usure.
Pilotage de la vitesse de rotation
Relation Vitesse et force contre-électromotrice à flux constant
Lorsque l’induit est alimenté sous une tension continue ou redressée U, il se produit une force contre-électromotrice E.
On a :
E = U – R x I [volts]
Où,
- R = la résistance de l’induit [ohm].
- I = le courant dans l’induit [ampère].
La force contre-électromotrice est liée à la vitesse et à l’excitation du moteur.
On a :
E = k x ω x Φ[volt]
Où,
- k = constante propre au moteur (dépendant du nombre de conducteurs de l’induit).
- ω = la vitesse angulaire de l’induit [rad/s].
- Φ= le flux de l’inducteur [weber].
En analysant la relation ci-dessus, on voit, qu’à excitation constante Φ, la force contre-électromotrice E est proportionnelle à la vitesse de rotation.
Relation Couple et flux
Quant au couple moteur, il est lié au flux inducteur et au courant de l’induit par la relation suivante.
On a :
C = k x Φ x I [N.m]
Où,
- k = constante propre au moteur (dépendant du nombre de conducteurs de l’induit).
- Φ= le flux de l’inducteur [weber].
- I = le courant dans l’induit [ampère].
En analysant la relation ci-dessus, on voit qu’en réduisant le flux, le couple diminue.
Variation de la vitesse
Au vu des relations existant entre la vitesse, le flux et la force contre-électromotrice, il est possible de faire varier la vitesse du moteur de deux manières différentes. On peut :
- Augmenter la force contre-électromotrice E en augmentant la tension au borne de l’induit tout en maintenant le flux de l’inducteur constant. On a un fonctionnement dit à “couple constant”. Ce type de fonctionnement est intéressant au niveau de la conduite d’ascenseur.
- Diminuer le flux de l’inducteur (flux d’excitation) par une réduction du courant d’excitation en maintenant la tension d’alimentation de l’induit constante. Ce type de fonctionnement impose une réduction du couple lorsque la vitesse augmente.
Le groupe Ward-Leonard

Le groupe Ward-Léonard représente l’ancienne génération des treuils d’ascenseur à traction à câbles. Ce système permettait de faire varier la vitesse d’un moteur à courant continu à excitation indépendante en réglant la tension de l’induit par l’intermédiaire d’une génératrice à courant continu dont on faisait varier l’excitation; la génératrice étant entraînée mécaniquement par un moteur à courant alternatif classique.
Pour une faible variation du courant d’excitation de la génératrice, il était possible de maîtriser des puissances énormes de moteurs à courant continu dans une plage de variation de vitesse très étendue.
L’électronique de régulation de vitesse est venue supplanter le système du groupe Ward-Léonard où le variateur de vitesse électronique vient contrôler :
- soit directement un moteur à courant alternatif,
- soit le moteur à courant continu seul rescapé du groupe Ward-Léonard.


![Types de gestion du trafic [ascenseurs]](https://energieplus-lesite.be/wp-content/uploads/2020/03/ascenseurs-trafic-bon-500x383.jpg)


Auteur : les anciens
Mars 2009 : Thibaud
Notes :
Juin 2009 : mise en page et liens internes, Sylvie