

Sommaire

Généralité
Le moteur synchrone est aussi un moteur utilisé pour la motorisation des ascenseurs. Ces dernières années ont vu ce type de moteur revenir en force parallèlement au développement des variateurs de vitesse.
Principe de fonctionnement
Le moteur synchrone se compose, comme le moteur asynchrone, d’un stator et d’un rotor séparés par un entrefer. La seule différence se situe au niveau de la conception du rotor. La figure ci-dessous montre un rotor à pôles saillants constitués d’aimants permanents ou d’électro-aimants alimentés en courant continu.

Après le démarrage, le moteur tourne en synchronisme avec le champ tournant. A vide les axes des pôles du champ tournant et du rotor sont confondus. En charge, les axes sont légèrement décalés. La vitesse du moteur synchrone est constante quelle que soit la charge. On notera aussi que :
- La charge (le système d’ascenseur) ne doit pas dépasser l’effort de démarrage entre le rotor et le champ tournant.
- Le couple moteur est proportionnel à la tension à ses bornes.
Caractéristiques
Les avantages et inconvénients du moteur synchrone sont repris ci-dessous :
|
|
(+)
(-)
|
Le stator
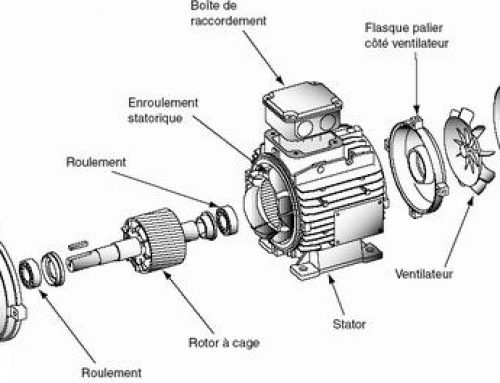
Le stator d’un moteur triphasé (le plus courant en moyenne et grosse puissance), comme son nom l’indique, est la partie statique du moteur synchrone. Il s’apparente fort au stator des moteurs asynchrone. Il se compose principalement :
- de la carcasse,
- des palier,
- des flasques de palier,
- du ventilateur refroidissant le moteur,
- le capot protégeant le ventilateur.


Stator.
L’intérieur du stator comprend essentiellement :
- un noyau en fer feuilleté de manière à canaliser le flux magnétique,
- les enroulements (ou bobinage en cuivre) des trois phases logés dans les encoches du noyau.
Dans un moteur triphasé les enroulements sont au nombre minimum de trois décalés l’un de l’autre de 120° comme le montre le schéma ci-dessous.
Variation de la vitesse en fonction du nombre de paires de pôles.
Lorsque les enroulements du stator sont parcourus par un courant triphasé, ceux-ci produisent un champs magnétique tournant à la vitesse de synchronisme. La vitesse de synchronisme est fonction de la fréquence du réseau d’alimentation (50 Hz en Europe) et du nombre de paire de pôles. Vu que la fréquence est fixe, la vitesse du moteur peut varier en fonction du nombre de paires de pôles.
| Paires de pôles | 1 | 2 | 3 | 4 | 6 |
| Nombre de pôles | 2 | 4 | 6 | 8 | 12 |
| n0 [tr/min] | 3 000 | 1 500 | 1 000 | 750 | 500 |
Le rotor
Le rotor est la partie mobile du moteur synchrone. Couplé mécaniquement à un treuil d’ascenseur par exemple, il va créer un couple moteur capable de fournir un travail de montée et de descente de la cabine d’ascenseur. Il se compose essentiellement d’une succession de pôles Nord et Sud intercalés sous forme d’aimants permanents ou de bobines d’exitation parcourues par un courant continu. On distingue donc deux types de moteurs :
- à aimants permanents,
- à rotor bobinés.
Rotor à aimant permanent
Ce sont des moteurs qui peuvent accepter des courants de surcharge importants pour démarrer rapidement. Associés à des variateurs de vitesse électronique, ils trouvent leur place dans certaines applications de motorisation d’ascenseurs lorsque l’on cherche une certaine compacité et une accélération rapide (immeuble de grande hauteur par exemple).
Rotor bobiné
Ce type de machines est réversible car elles peuvent fonctionner en régime moteur comme en régime alternateur. Pour les moyennes et grosses puissances, les moteurs synchrones à rotor bobiné, associé avec un variateur de vitesse, sont des machines performantes.
Comme le montre la figure ci-dessous, le rotor est composé d’un empilement de disques ferro-magnétiques. Comme dans le stator du moteur, des enroulements sont logés dans des encoches pratiquées sur le rotor et reliés électriquement aux bagues de bout d’arbre. L’alimentation en courant continu s’effectue via l’ensemble bagues-balais.

Pilotage de la vitesse de rotation
Le pilotage de la vitesse de rotation du moteur synchrone est essentiel pour beaucoup d’applications.
La relation suivante permet de cerner quels sont les paramètres qui peuvent influencer la vitesse de rotation.
On a :
n0 = n
Avec,
- n0 = vitesse du champ tournant [tr/min].
- n = la vitesse de rotation de l’arbre du moteur [tr/min].
Ou :
n = f / p
Avec,
- f = fréquence du réseau [Hz].
- p = le nombre de paires de pôles du stator.
On peut donc piloter la vitesse de rotation en intervenant sur :
- le nombre de paires de pôles (moteur à nombre de pôles variable),
- la fréquence du réseau.
Régulation de fréquence
À l’heure actuelle, le pilotage de la vitesse des moteurs synchrones se fait électroniquement grâce à des variateurs de vitesse. Pour cette raison, on ne parlera ici que du contrôle de la fréquence qui de loin la plus courante. Vu la nécessite pour un moteur synchrone d’être démarré avec un système auxiliaire (le rotor ne peut pas “accrocher” un champ tournant statorique trop rapide de 3 000 [tr/min]), le variateur de fréquence associé au moteur synchrone permet de le démarrer avec une fréquence statorique faible voire nulle.
Sans perte de puissance, on peut piloter la vitesse de rotation du moteur en faisant varier la fréquence et la tension car la vitesse de rotation du champ tournant au niveau du stator change.
A remarquer que le couple d’un moteur synchrone ne change pas en fonction de la vitesse puisqu’il n’y a pas de glissement.

Variation de la vitesse à couple constant (moteur synchrone).
Le pilotage du moteur synchrone par un variateur de fréquence montre des intérêts certains; à savoir principalement :
- La limitation du courant de démarrage (de l’ordre de 1,5 fois le courant nominal),
- Un couple constant quelle que soit la vitesse du moteur.


![Types de gestion du trafic [ascenseurs]](https://energieplus-lesite.be/wp-content/uploads/2020/03/ascenseurs-trafic-bon-500x383.jpg)


Auteur : les anciens
Mars 2009 : Thibaud
Notes :
Juin 2009 : mise en page et liens internes, Sylvie
[…] Read More […]
[…] Read More […]
[…] Read More […]